Details:
- Kuka KR3 robot
- Logitch Webcam
- ROS (Robot Operating System)
- Home brewed moveable platform w. motor servo
YouTube:
Lego Sorting Robot

Details:
YouTube:
Lego Sorting Robot
Tricky business coming up.
For now, I’m diving into SIFT and SURF, which aren’t exactly designed to find features in deformable objects, but it’s a place to begin, if you want to learn about finding features.
SIFT (Left) | SURF (Right)
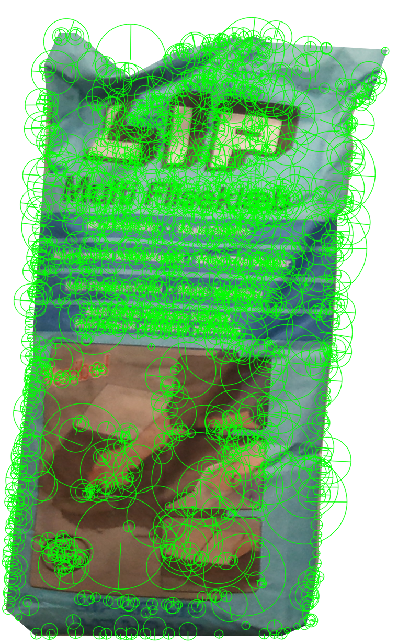
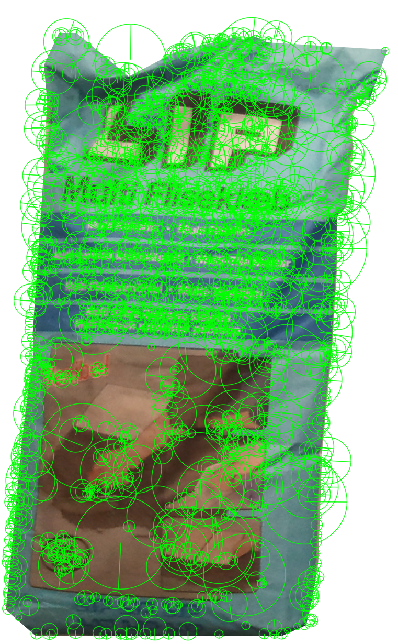
Are exactly the same here. This is also to be expected, since SURF is a derivative of SIFT.
Details to come.
Here’s a short description in the meanwhile:
This is a class I wrote for a host, which should handle some requests, given by clients.
The part to notice here is the way select() is used. I found that socket.recv() was a blocking call and since any method of trying to make it non-blocking failed with some error, I had to use select(). Select reads from selectable inputs (ie. socket or user inputs), and returns a list of sockets with data read. You may then use socket.recv() on these sockets, because there is data avaiable and this won’t block the program while waiting for data.
class ClientHandler(): # Initializes a client handler # Takes the host socket as argument def __init__(self, socket): self.hostsoc = socket self.sockets = [self.hostsoc] self.clients = [] # Automatically removes dead clients def serveclients(self): # Select available sockets rready, wready, err = select.select(self.sockets, [], [], 0) for s in rready: # If there was a new connection if s == self.hostsoc: # Accept the new socket c, addr = s.accept() # Create new clients of the new socket client = Client(c, addr) self.clients.append(client) # Append the new socket to the client handlers list of sockets self.sockets.append(c) # If data was available on existing clients else: #Read data = s.recv(1024) if data: # Get the sender (client) for c in self.clients: if s == c.socket(): sender = c break # Append the data to the clients queue sender.appenddata(data) # Handle any complete requests there may be sender.handle() # Add data to client data queue #print "Received %s" % ( data ) else: # Mark the corresponding client as inactive ... for c in self.clients: if s == c.socket(): c.deactivate() break # ... and remove the socket descriptor from the list of avilable sockets self.sockets.remove(s) # Close the socket s.close() # Return return True